
栏目分类
发布日期:2025-02-23 06:14 点击次数:194
跟着智能驾驶技艺的连忙发展,一场对于“车位到车位”功能的竞赛正在汽车行业是非演出。这一主张的初次淡薄,要回首到2024年4月,由华为引颈,其中枢在于选定端到端架构的ADS 3.0技艺。在这一技艺框架下,“车位到车位”功能不仅是对智能驾驶场景淹没度的一次飞跃,更是对智驾功能连贯性、运动性的全新挑战。
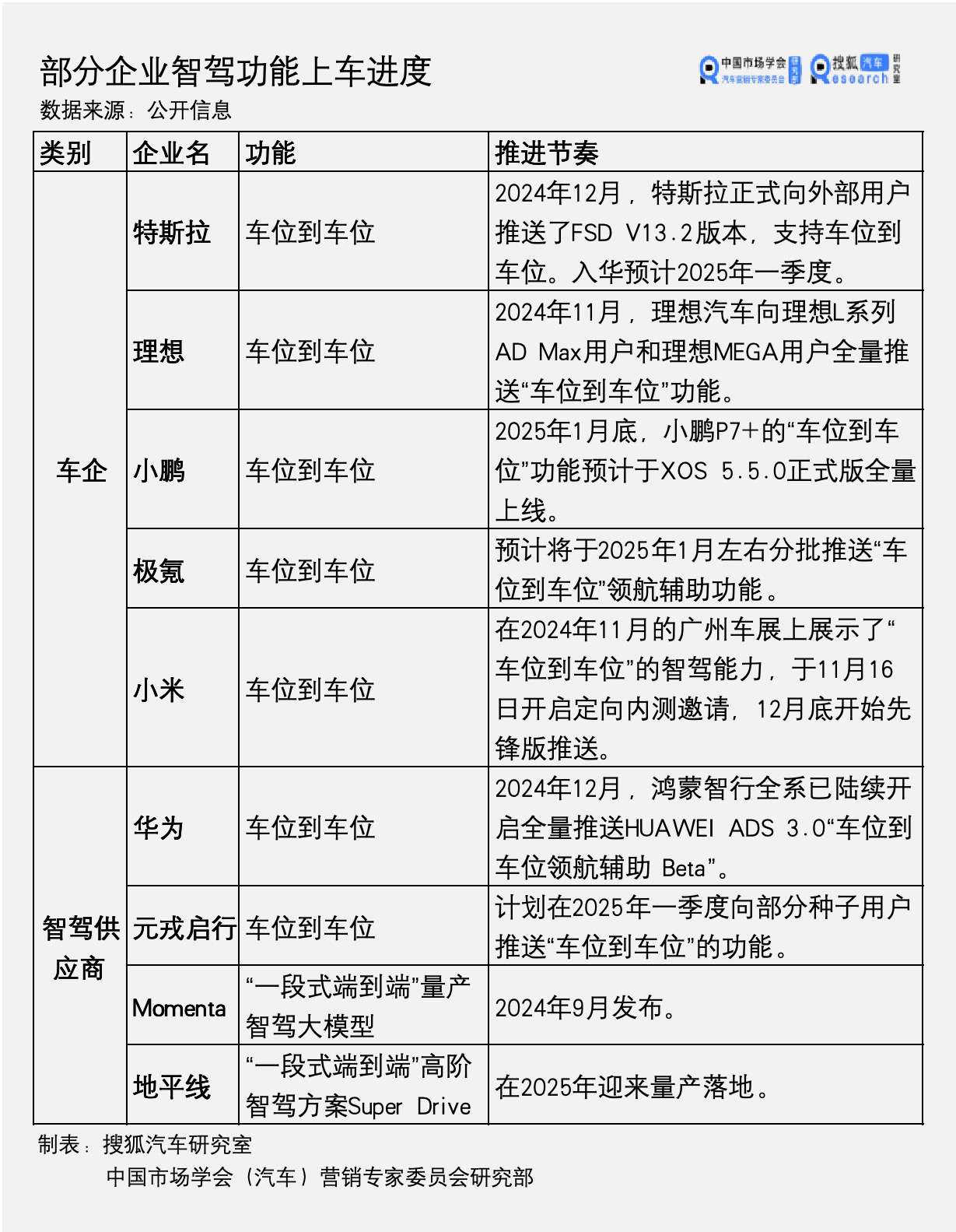
华为、理思与特斯拉,手脚这场竞赛的先驱,分别在2024年的11月、12月,以及年底前,向用户推送了这一功能。它们的技艺已毕旅途虽有不同,但皆标识着智能驾驶技艺向更高阶段迈进的决心。2025年头,更多参与者加入战局,小鹏、极氪、元帅启行等企业纷繁文书将在年内推出“车位到车位”功能,小米汽车也已开动时尚版推送,市集竞争愈发是非。
“车位到车位”功能,简而言之,即是从肇端车位到办法车位,车辆能够全程进行智能驾驶。这一功能的已毕,依赖于端到端智驾技艺的冲破。它不仅淹没了高速、城市说念路、泊车场等多种场景,还能在多样场景间顺滑切换,已毕全程无摄取。华为、理思等企业的智驾系统,已能够自动通过高速ETC、泊车场闸机等此前需要驾驶员操作的场景,大大提高了驾驶的方便性和安全性。
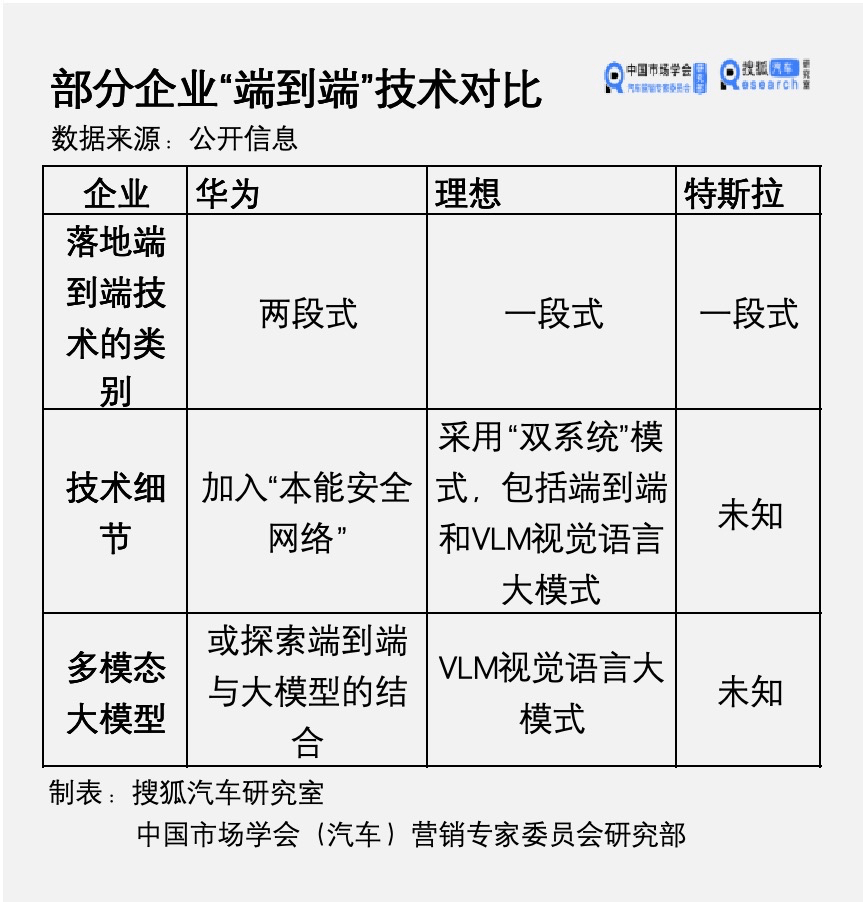
关连词,在端到端智驾技艺的火爆背后,技艺路子的不合冉冉线路。现在,业内大皆将端到端智驾技艺分为一段式端到端和两段式端到端。一段式端到端被视为终极办法,它去掉了决议、规控等功能的明确别离,多个经由如鱼得水,感知信号输入后平直进行决议信号输出。而两段式端到端则保留了感知、决议、规控两个经由。华为、理思、特斯拉分别选定了两段式、一段式和可能的一段式(特斯拉信息有限),展现了不同企业的技艺选拔和战术考量。
除了端到端技艺本人的不合,多模态大模子也成为了技艺焦点。VLM(视觉-言语模子)、VLA(视觉-言语-动作模子)等主张与端到端一同站在了技艺的聚光灯下。理思的VLM、基于此更进一步的VLA,以及地平线的World Model等,皆是多模态大模子在智能驾驶限度的探索。
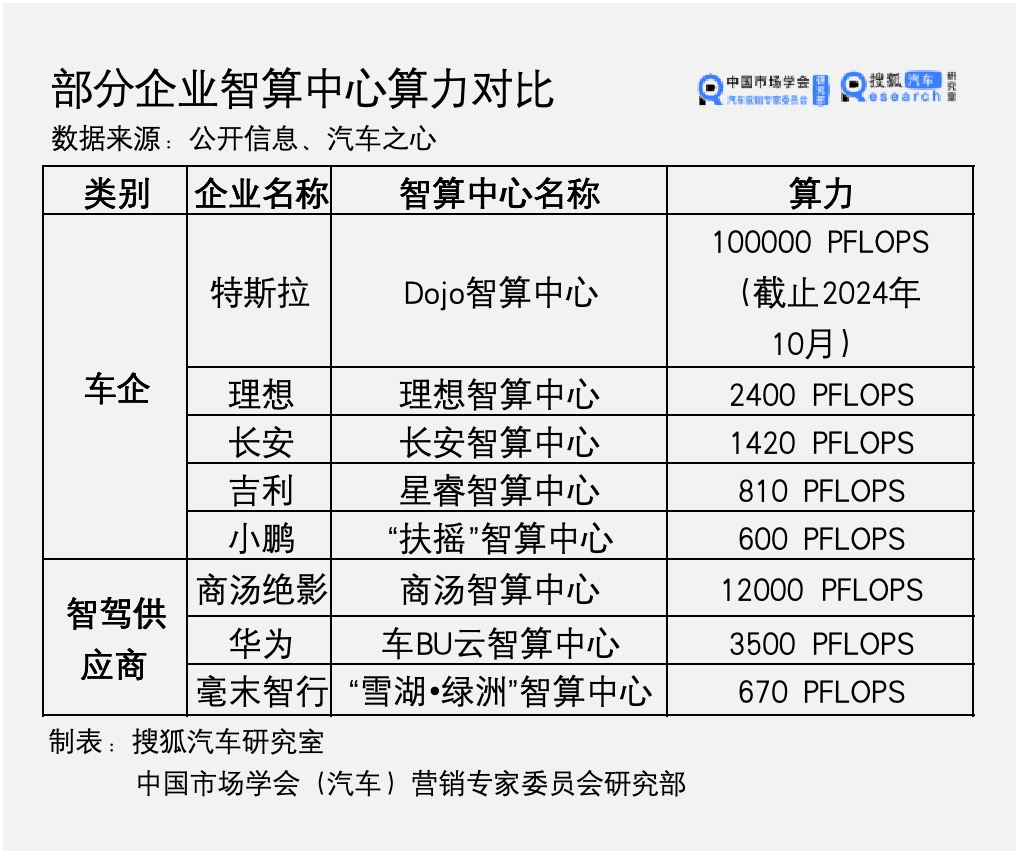
在这场技艺变革中,智驾企业靠近着前所未有的挑战和机遇。一方面,技艺路子的选拔将平直影响企业的生活和发展;另一方面,市集的响应也将成为素养技艺见效的关节。算法、算力和数据,成为了智驾企业竞争的中枢成分。逾越的算法需要豪阔多的技艺东说念主才进行研发,而算力的提高则依赖于财力和先天上风,数据的数目和质地则平直决定了系统的迭代速率和效用。
对于初创智驾公司而言,容错率极低,技艺路子的抉择简略将决定存一火。四维图新CEO程鹏曾暗示,从资金角度分析,2024年未上市的公司将靠近严峻挑战,即便上市了,融资额也可能只可守旧一年阁下。因此,如安在有限的时辰内,储备豪阔的算法、算力和数据资源,成为了智驾企业脱颖而出的关节。
在这场智能驾驶技艺的竞赛中,每一个细节皆可能成为决定赢输的关节。算法的优化、算力的提高、数据的积贮,以及技艺路子的选拔,皆将共同塑造智能驾驶的曩昔。跟着2025年的到来,智驾企业正站在历史的调度点上,它们的选拔和奋勉,将决定谁能在这场技艺变革中脱颖而出,成为智能驾驶限度的领航者。